
2024年春、OM-1からわずか2年でOM-1 MarkⅡ(以下、MarkⅡ)が発売されました。MarkⅡには新たな機能追加だけでなく、OM-1登場以来不評だったAFの改善も施され完成度を高めました 。このMarkⅡの機能追加、AF改善の一部は、OM-1にもファームウェアアップデートで2024年8月末から提供されています。OM-1の新ファームウェアVer1.7によってモータースポーツ撮影にはどのような効果が得られるか試してみました。
Topics
OM-1に対する不満がMarkⅡの登場で拍車がかかり新ファーム提供へ
前回までに、OM-1の特に被写体検出AFにはそれまでのオリンパスOM-Dシリーズに比べてクセが感じられることを紹介しましたが、私だけでなく、AFには不満を覚えるユーザーは多かったようです。SNSを見てるといろいろ出てきますが、私のX/TwitterのOM-1購入の年に書いたAFに関するポストを振り返るだけでもいろいろ…

有名どころでは、マップカメラさんのレビューでも(珍しくSUPERGTを撮影したレビューになっている)、明らかにダメとは書いていないものの、AFが手前の金網に引っ張られることが記されています。
こういった状況を受けて、OMデジタルソリューションズ(以下、OMDS)も2023年いっぱいまでにファームウェアをVer.1.1から1.5までこまめにバージョンアップしたものの、万全とまではいかず、とうとうそのままの状態で2024年にMarkⅡが発売。
オリンパス時代はOM-Dシリーズ/E-M1系で大小様々なファームウェアバージョンアップが行われ、不具合修正のような小さな改善から、それこそAFの機能追加・性能アップのようなメジャーバージョンアップまで、そのハードウェアのポテンシャルをめいいっぱい使い切ろうという姿勢が多くのファンの共感を得ていたなか、同様の進化を期待してOM-1を購入した人も多かっただけに、MarkⅡ発売のショックは大きかったはずです。
思えば、オリンパスから切り離される途中のOMDSにとっては、当初のOM-1は刷新部分が多くてバグだらけでリソース不足が祟った形だったから、「信者以外はOM-2だのMarkⅡを待て」だったよな。
そしてちゃんと作り直しができたのが1年後だったと。 https://t.co/3aY19RwOXD— Gami@43RacePhotos.com (@43racephotos) 2024年2月24日
オリンパスからスピンオフされたOMDSの状況は必ずしも芳しいものではないと噂話は聞こえていましたが、いざ、こうやってフラッグシップ製品のユーザーを切り捨てるともとれるような状態には、多くの反感を買ったようです。ほどなくしてMarkⅡに採用されたAFと機能の一部をOM-1にも与えるファームウェア提供を行うことになりました。

MarkⅡの発売開始から半年程度遅れての新ファーム提供は、OM-1のユーザーからすると「姑息」ともとれるでしょうし、「なんとしてでもMarkⅡの新機種効果を削ぐわけにはいかない」というOMDSの腐心もうかがえましたし、「OM-1の新ファームが出た程度でMarkⅡの売上が下がるほど、MarkⅡの新規性はわずかなのか?」という穿った見方もできました。
MarkⅡ(というかOMDS)に対する恨み節はこのくらいにして、今回はOM-1の新ファームウェアについて検証します。
OM-1のAFまわりの不満点と新ファームウェアの内容
前回までに紹介してきたAFにおけるOM-1の特徴として、以下の3つを挙げているのですが、それがそのまま不満点ともいえます。
- 手前のオブジェクトにAFが引っ張られる
→被写体検出した被写体にAFし続けてくれない、AFリミッターを設定してもダメ - 被写体のまわりに発生している陽炎に対してAFが不安定
→フォーカスが途中で止まる/飛ぶ、※Ver1.4である程度改善してはいる - センサーへの入射光量が少ない条件でフォーカス動作を行うとEVFがコマ落ちする
→NDフィルターやテレコンを使用すると、EVFの表示リフレッシュレート/fpsが下がる
これに対して2024年8月29日に提供開始されたファームウェアVer.1.7の内容ですが、
- S-AFとC-AFのオールターゲット 時の、主要な被写体に対するAF性能を向上しました。
- 撮影時の消去ボタンでのメニュー操作に対応し、右手でのメニュー操作を可能にしました。
- 手持ちハイレゾショットの合成アルゴリズムを改善しました。
- その他カメラの動作安定性を向上しました。

毎度のことですがオリンパス/OMDSのファームウェアの内容説明はざっくりした書き方なので、更新してみるといい意味で驚かされることもあれば、それほど効果が実感できなくて「まぁ、この程度と思わせる書き方だよなぁ…」となることもあります。
そこで、OM-1のファームウェアVer1.7の効果について、サーキットでの撮影で冒頭の3つの不満が解消されたかという点で検証し、OM-1の価値/MarkⅡの必要性を考えたいと思います。
検証の機材と撮影条件など
被写体とロケーション
ファームウェアが発表された後の9月6日〜7日に、栃木県モビリティリゾートもてぎで行われたスーパー耐久第4戦もてぎスーパー耐久5時間レースのうち、初日9月6日のフリー走行を撮影しました。
検証機材
OM SYSTEM OM-1 Ver.1.7
当たり前ですがボディはOM-1。前日までにファームウェアバージョンアップを行った本機のみでそれ以前との比較を行います。

M.ZUIKO DIGITAL ED 100-400mm F5.6-6.3 IS
OM-1購入時からずっとモータースポーツ撮影のメインレンズとして使用しています。OM-1との組み合わせのクセなどもこのレンズでの挙動を基本に評価しています。

M.ZUIKO DIGITAL ED 12-100mm F4.0 IS PRO
焦点距離100mm未満はこちらで対応。F4通しではあるもののそこはPROレンズ、広角から望遠域までカバーする光学系はモータースポーツ撮影でも使いやすい超便利ズーム。検証には直接使用していませんが、今回は後半の作例に使用しました。

撮影条件
カメラ本体側は、流し撮りに必要な設定で基本的にRAW撮影しています。
- 撮影モード:シャッタースピード優先またはマニュアル露出、静音連写(電子シャッター、最大20fps)
- 感度設定:ISO80またはISO200
- AFモード:被写体検出[モータースポーツ]を使用し、C-AFまたはC-AF+TR(本文中では1つのシーンでおおよそ同じ頻度で切り替えており、特に説明ないかぎり、まとめて「C-AF」と記載します)
- AFターゲットモード:オールターゲット
- AF追従感度:-2〜+2(構図に応じて適宜変更)
- 手ブレ補正:IS-AUTOまたはIS-OFF
- EVFフレームレート:高速
現像条件
以下の写真は特に記載のない限り、いずれもRAWデータからOM SYSTEM標準の現像アプリケーションOM WORKSPACEを使って以下の条件で現像したもので、可能な限りカメラの素の画質や色味が表現される設定で現像しています。
- トリミング:個別に適宜設定(トリミング後のサイズは1080×1440ピクセル相当にリサイズ)
- 露出補正:個別に微調整範囲で設定
- ホワイトバランス:オート(電球色残し:OFF)
- 仕上がり:Natural
- 階調:標準
- カラー設定:sRGB
他の項目については設定せず
検証結果
さっそく、冒頭に書いたAFの不満点1~3に対応させる形で検証した結果を紹介します。
検証1.手前のオブジェクトにAFが引っ張られることなくAI検出した被写体にAFし続けられるか?
今までのOM-1 で一番不満だったのが、カメラと被写体との間に障害物がある場合にAI被写体検出をしているにも関わらずに手前の障害物にフォーカスが移ってしまうことでした。同じAI被写体検出があるE-M1Xだけでなく、それ以前のE-M1系のボディでも起こらなかったことだけに、とても不満で、これをきっかけにOM SYSTEMをあきらめた人も結構いるはず。
特にモータースポーツ撮影では、被写体までの間に金網/フェンス、ガードレール、タイヤバリアと、観客と競技者を守るための施設がある以上避けられないことで、特にフェンスが入る条件では、OM-1の場合、AFをあきらめて置きピン(あらかじめ決めた構図にあわせて身近な物体でMFでピントを決めておいて撮影する)していました。
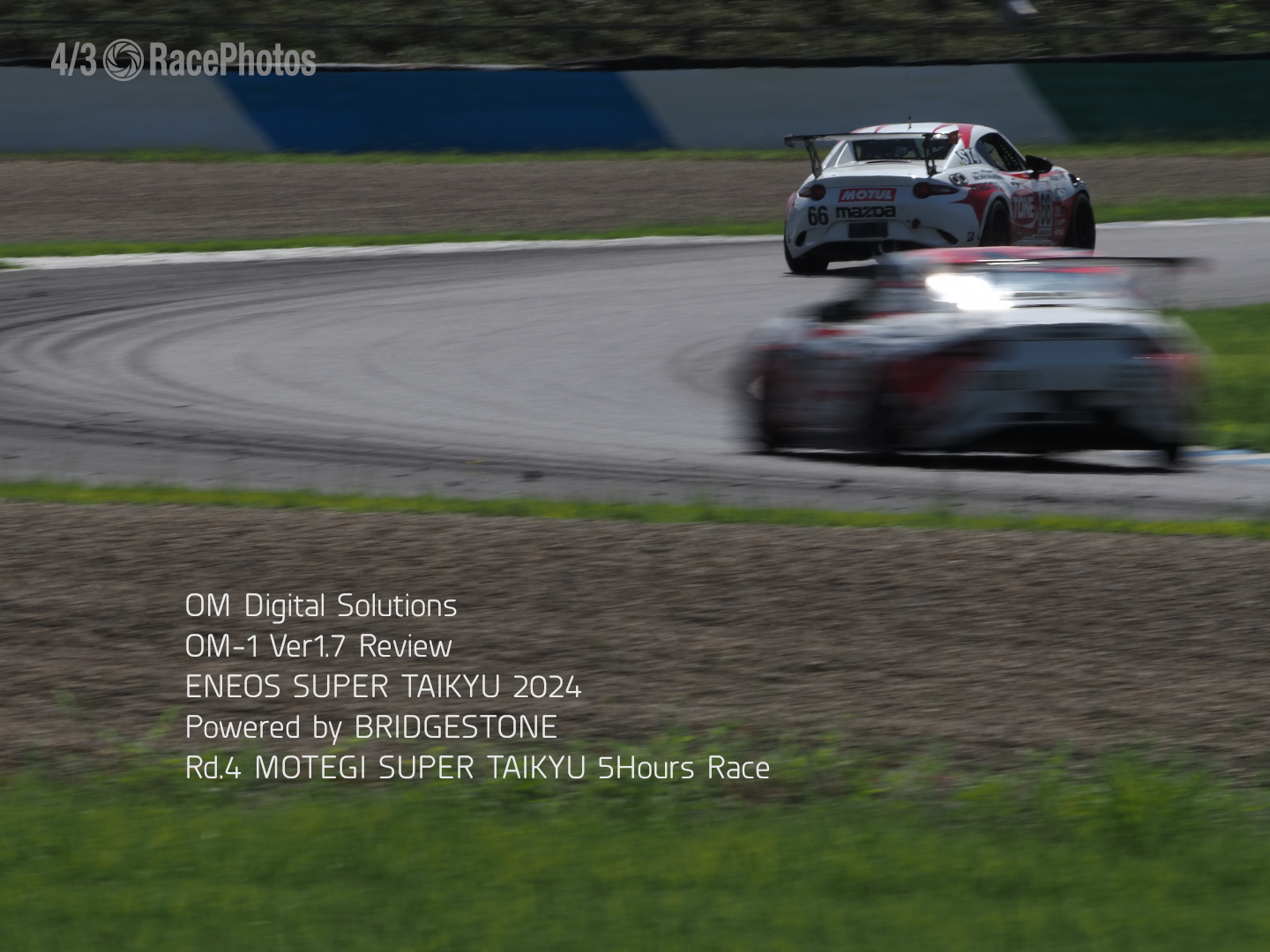
そこで、金網越しや画面奥に被写体を置くような奥行きを意識した構図で撮影してみました。
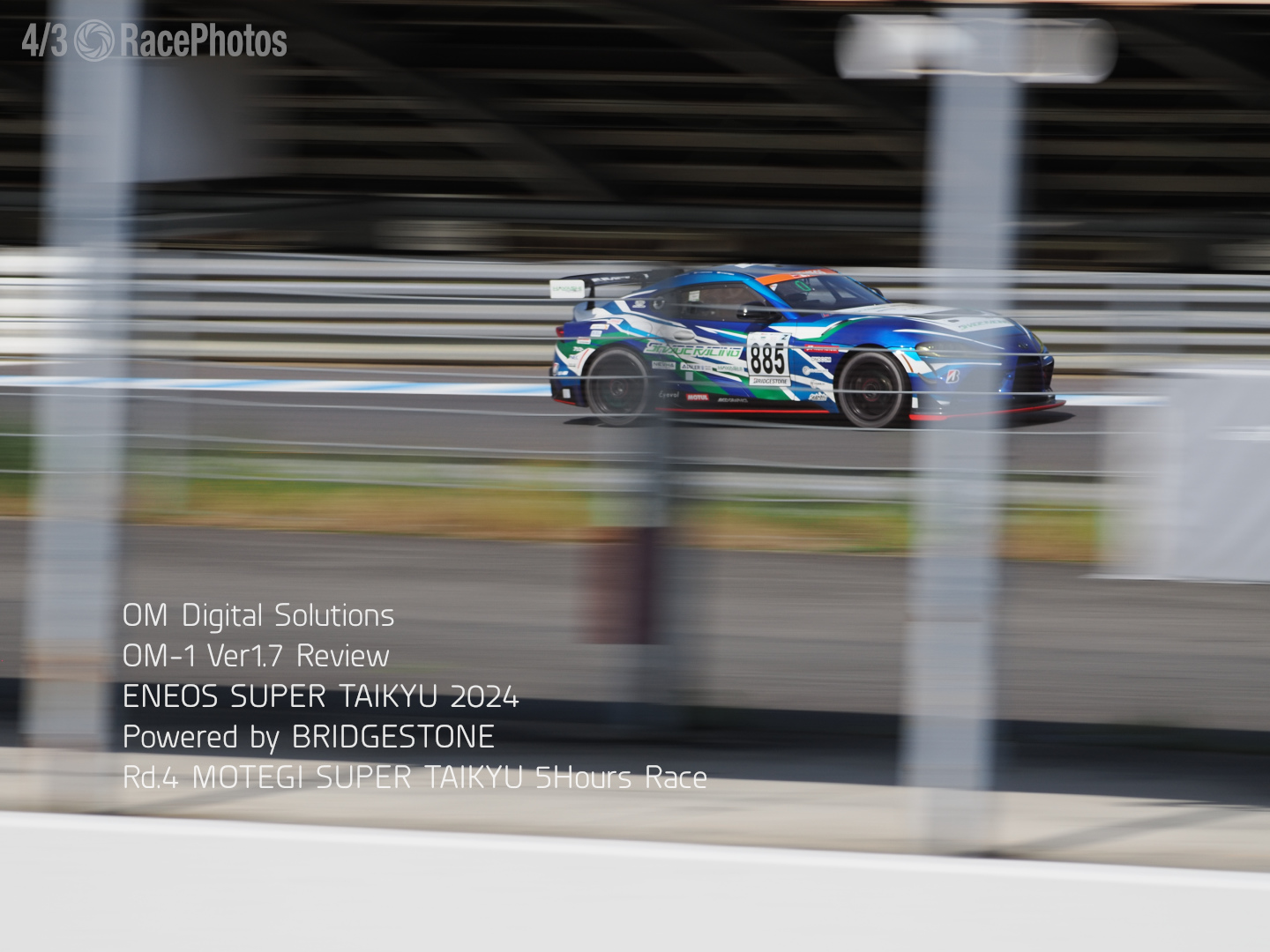
まずは、コース周回の内側に位置する、S字出口イン側に陣取り、画面左から右方向に走行するマシンが被写体です。レンズ前玉から50cmくらい前に金網がある状態で、金網越しに被写体認識した状態からC-AFを開始してレリーズすると…

f/16 1/125sec ISO-200 150mm
ごらんのように、手前の金網にAFが引っ張られずにちゃんと被写体であるマシンを追従して撮影できました。
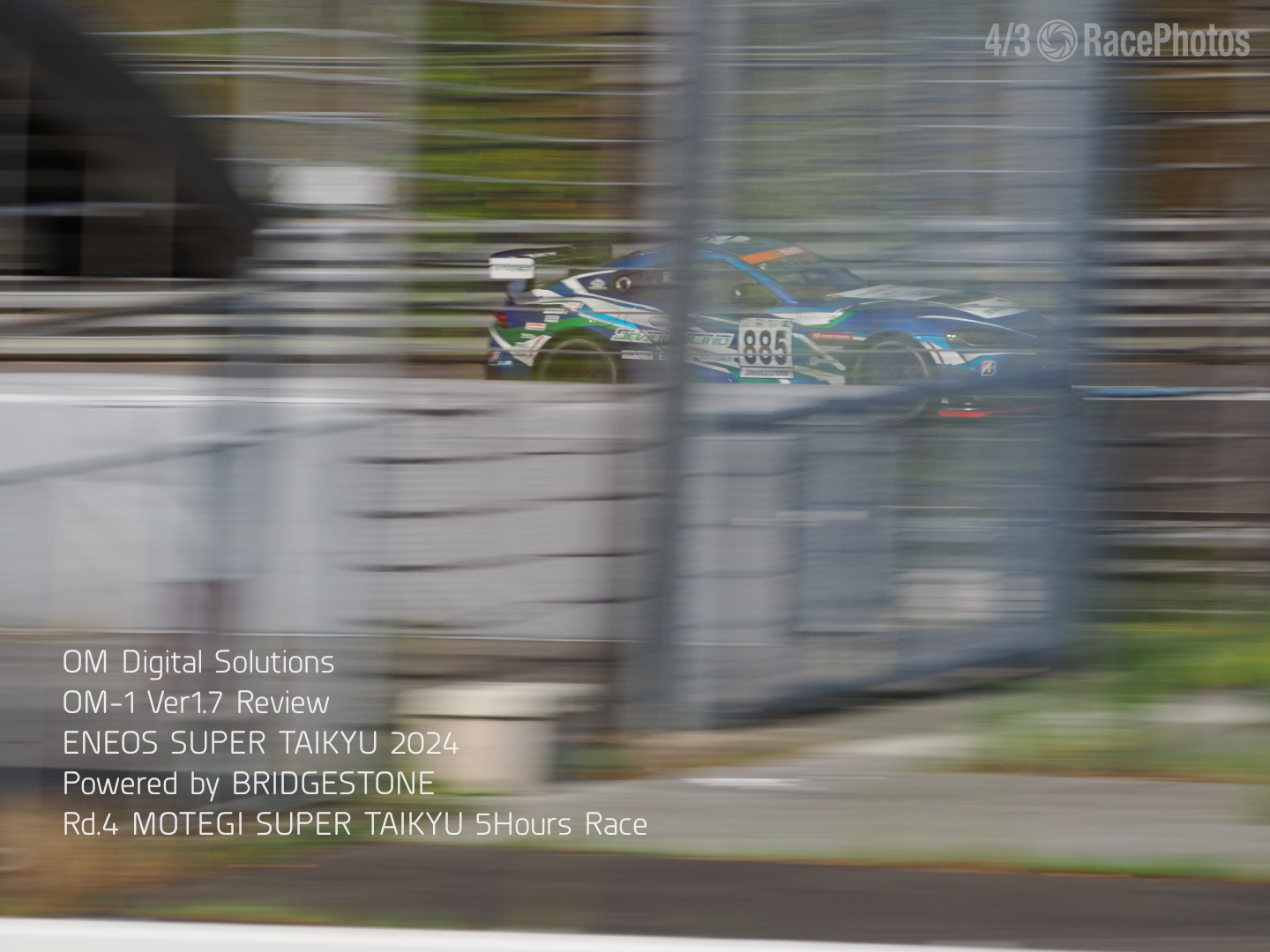
これはあくまで検証用の作例として、絞り込んで金網を画面に写していますが、絞りを開放したり、スローシャッターで流すなどして「金網を消す」場合にも有効です。

f/5.7 1/60sec ISO-80 150mm
マイクロフォーサーズの深い被写界深度では、絞りだけでは金網をボカして完全に「消す」ことは難しいですが、それでも、それほど難しくない程度のスローシャッターである程度までは金網を消すことはできます。この撮影の間も当然AFはマシンを追い続けてくれました。
この例のように、カメラと金網の距離が十分近い場合は、特に金網を意識することなくAFを使うことができますが、金網が1m以上先にある場合などは、AFリミッターが有効です。OM-1の場合はボディの機能としてソフトリミッターが、また100-400mmのような望遠レンズにはレンズ側にAFリミッターがあるので、撮影時の障害物との位置関係を考えていずれかを設定すれば、うまく障害物を避けて被写体を追従してくれます。
f/22 1/60sec ISO-80 200mm
カメラと障害物の間よりも、障害物と被写体の間の方が近い場合は、AFリミッターでは対処しにくいことがあります。
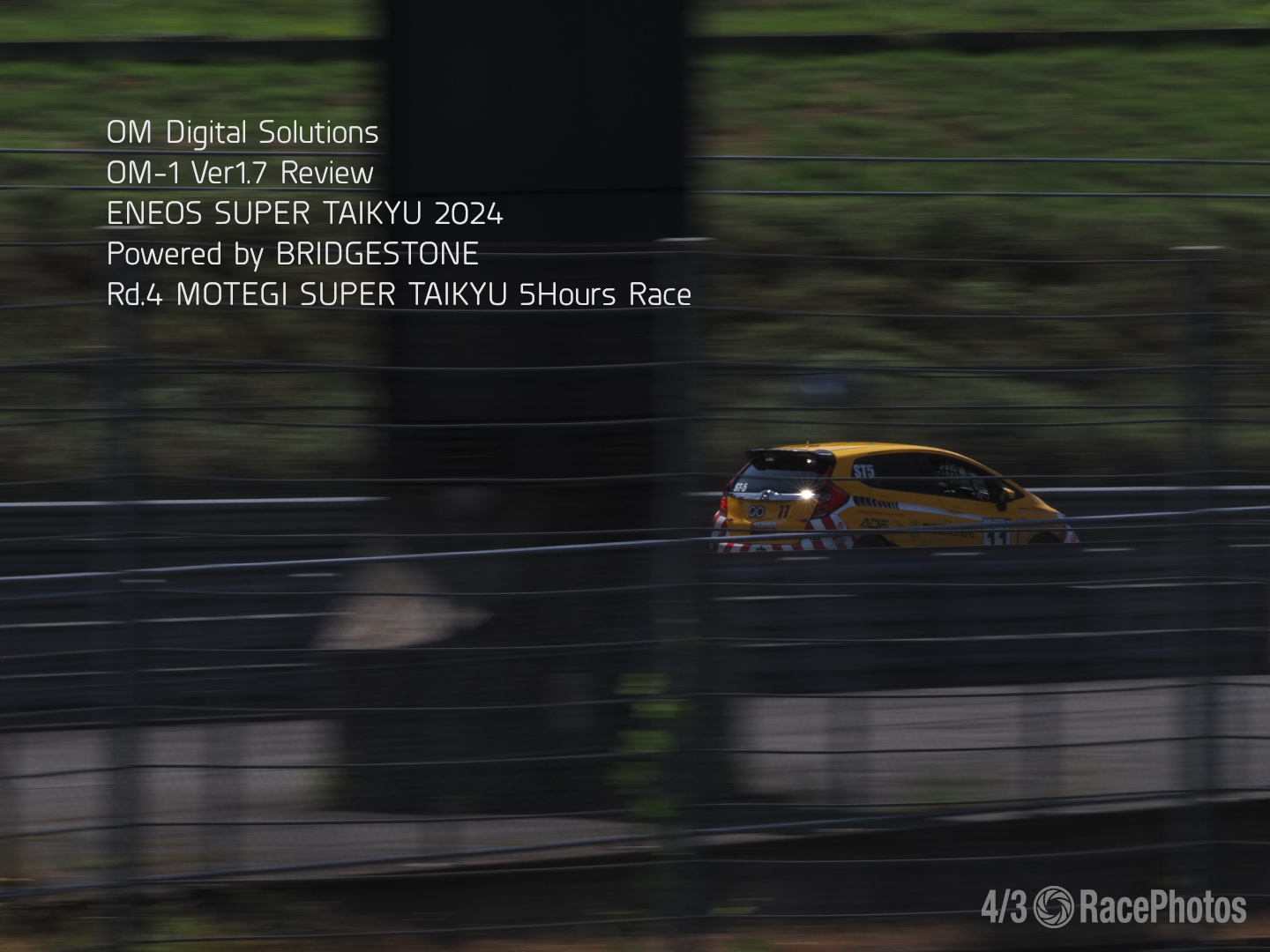
上の写真は、V字コーナースタンドの上から第二パドックを挟んでコース向こう側のダウンヒルストレートに向かって、画面左から右方向に走行するマシンを被写体に撮影したもの。カメラと被写体まではおよそ100~120mくらい、その間に第二パドックの施設(カメラから80~100mくらいの位置)が障害物となるため、AFリミッターでは障害物と被写体を分けてC-AFを行うのは難しいです。
ここでは、C-AFの追従感度を-2に設定します。被写体を追従途中で手前の柱が被った場合もAFの追従をわざと鈍感にすることで、柱にフォーカスが移らないようにできました。

 f/6.3 1/60sec ISO-200 200mm
f/6.3 1/60sec ISO-200 200mm
今度は、ダウンヒルストレート側に移って、先ほどとは逆に第二パドックとその屋根の隙間に見えるマシンを連写して撮影したものです(カメラと被写体との距離感は同じくらい)。
被写体は画面左から右に動いていきます。1枚目の撮影に入る直前に被写体検出してC-AF開始、C-AF追従感度を-2にしているので、2枚目以降は、パドック脇のバリヤや柱、フェンスといった障害物の影響を受けずにほぼピントを外さずに撮影できています。
もっと詳しく
これを少し補足すると、E-M1X/OM-1系の被写体検出AFは、ファインダー内に被写体を検出した後、C-AFとC-AF+TRで動作が若干異なります。
C-AFの場合、検出した被写体の特徴点(Fグリルやドライバーのヘルメット)にAFターゲットを合わせて、次のフレーム(瞬間)にはまた被写体を検出して特徴点にAFターゲットを合わせるという動作を連続的に繰り返します。そのため、C-AF中に障害物で被写体が遮られ、被写体検出できないくらい隠れてしまうと、その時のAFターゲットの位置で通常のC-AFの動作となってしまいますが、再び検出できればC-AFは続きます。
C-AF+TRの場合、最初に被写体を検出し、その特徴点に最初のAFターゲットを合わせると、その後は従来のC-AF+TRと同じアルゴリズムでAFターゲットを追従します。C-AF+TRの途中に障害物で被写体が遮られると(追従中のAFターゲットの位置に障害物が被ると)、その障害物にAFターゲットが移ってしまう可能性があります。
この違いは、森の木々の中にたたずむ鳥のような、被写体検出機能にAFを頼るようなシーンではとても重要ですが(OMDSでは被写体検出を利用する場合はC-AFの方を推奨している)、サーキットを走行する自動車といった、目視でも被写体を認識できるシーンでは、大きな差とはならないようです。


いずれの場合においても、追従感度を下げておくことで、障害物で被写体が遮られた場合のAFターゲットの位置に安定性を持たせることができます。
f/14 1/15sec ISO-80 100mm
このように、被写体検出を利用することでファインダー内に入った被写体をいち早くとらえてAFを始めることができるわけですが、逆に、ファインダー内に被写体を検出することができないと、AFも通常のC-AFとしてオールターゲットの場合だと中央のAFターゲットからスタートしてしまうことになります。
被写体検出機能で、モータースポーツ被写体のモードでは、(あくまで私の主観ですが)画面全体面積の10〜20%を越える程度の大きさまで被写体全体(自動車と認識できる範囲)がファインダーに映らないと被写体検出してくれません。
例えば上の写真では、画面全体面積に対して比較的小さめに被写体が入っていますが、この大きさでは被写体検出はできません。この写真に関しては置きピンで撮影しています(ルーフが第二ピットの屋根に隠れていますが、車体の大半が入っているので、これ自体は検出に影響しません)。

f/22 1/60sec ISO-80 400mm
ここまでは画面左右方向に移動する被写体に対するAFでしたが、フォーカスレンズが大きく動くのは画面奥行方向へのAFの方でしょうから奥行方向の移動も重要だと思われます。そこで今度は画面奥行方向へ被写体が移動する構図に挑戦。
上の写真は、ヘアピン手前アウト側に陣取って、画面右下から左上(画面奥)へ移動している被写体を追いかけてバックショットを撮影しました。今までだと、検出した被写体を追従していても、手前100m看板を通過する瞬間に看板にAFターゲットが移ってしまいましたが、Ver.1.7ではしっかりマシンを追従しています。こういった奥行方向に変化があるシーンに関しては単純に置きピンなどで代用できないだけに影響が大きいです。
ここまで見てきたように、ファームウェアVer.1.7によって、C-AFが(OM-1より前の機種がそうだったように)本来あるべき適切な動作をするようになったことで、目玉機能である被写体検出が効果的に機能し、さらにAFリミッターやC-AF追従感度と補助機能とあわせて、「本来OM-1に求めていた」「ミラーレスフラッグシップにふさわしい」AF性能を引き出すことができるとわかりました。
検証2.被写体まわりの空気のゆらぎ(陽炎など)に影響されずにAFできるか?
当たり前すぎることですがモータースポーツのフィールドの大半は黒いアスファルトの上で、レースが行われるかなりの場合で昼間のよく晴れた状況下です。真夏に限らず、熱く熱せられたアスファルトの上にゆらゆらと陽炎が立ち込めることが多いわけですが、OM-1のAFは当初からこのゆらぎの影響を受けてきました。
AF-Cが路面の陽炎を拾ってピントが合わない😇
被写体認識と合わせるとなお狂う🙄— Gami@43RacePhotos.com (@43racephotos) 2022年5月4日
具体的には、被写体のまわりに陽炎などで空気のゆらぎが発生している場合に、カメラはそのゆらぎを通して被写体をとらえようとするので、正確な測距ができずに途中でAFが止まったり、無限遠に向かってフォーカスが飛んでしまったりしていました。ファームウェアVer.1.4まででかなり改善されたものの、成功率としてはイマイチでした。それがVer.1.7でどれだけ改善されたか?

f/22 1/60sec ISO-80 400mm
検証としては、サーキット外周側コースサイドからS字コーナーのエイペックスを通過するマシンを被写体として撮影します。11時過ぎのこれから太陽が南中を迎えようとしているタイミングですが気温はすでに33℃を超えており、目視ですでに陽炎が上がっていることがわかる状況。
上の写真は、比較的スローシャッターと陽炎のせいでピントの合否判断が難しいところですが、バンパー下部の文字や車体下面のロードクリアランスなどを見る限り、Ver.1.4以前よりもしっかりAFが動いていることは確かです(今まではこれすらあやしかった)。
f/22 1/60sec ISO-80 244mm
陽炎に囲まれた状態でAFできること自体は、ゆらゆらしている画像が決して美しいとは言い切れず、あまり意味はありませんが、陽炎に囲まれた状態からC-AFが被写体を追従してくれることによって、例えば上の写真のように、コーナーを立ち上がっていく姿をより正確に撮影することができるようになります。この例では、画面下半分を占める(被写体より手前にある)ランオフにAFが移ることもないですし、C-AF+TRを使うことで撮影したいマシンの前を別のマシンが横切っていてもしっかり追従してくれており、実は「今までAFまかせでは撮れなかった」構図。
検証3.センサーへの入射光量が少ない条件でもEVFがコマ落ちせずに違和感なくAFできるか
AFそのものに関する検証としては1、2だけになりますが、OM-1を使っていてどうしても気になるのがEVFのフレームレート。「高速」設定で120fpsで表示できているともいわれますが、100-400mmといった比較的暗いレンズにテレコンをつけたり、スローシャッターで撮るためにNDフィルターなどをつけ、撮像センサー(≒AFセンサー)に入る光が少なくなると、C-AF中のEVF表示がコマ落ちしてしまい、特に離れた被写体をカメラとレンズを振りながらEVF越しに追いかけるのが難しいです。
そこで、ファームウェアVer.1.7のOM-1にテレコンMC-14とND16フィルタをつけてスローシャッター撮影を試し、EVFの見え方をチェックしました。
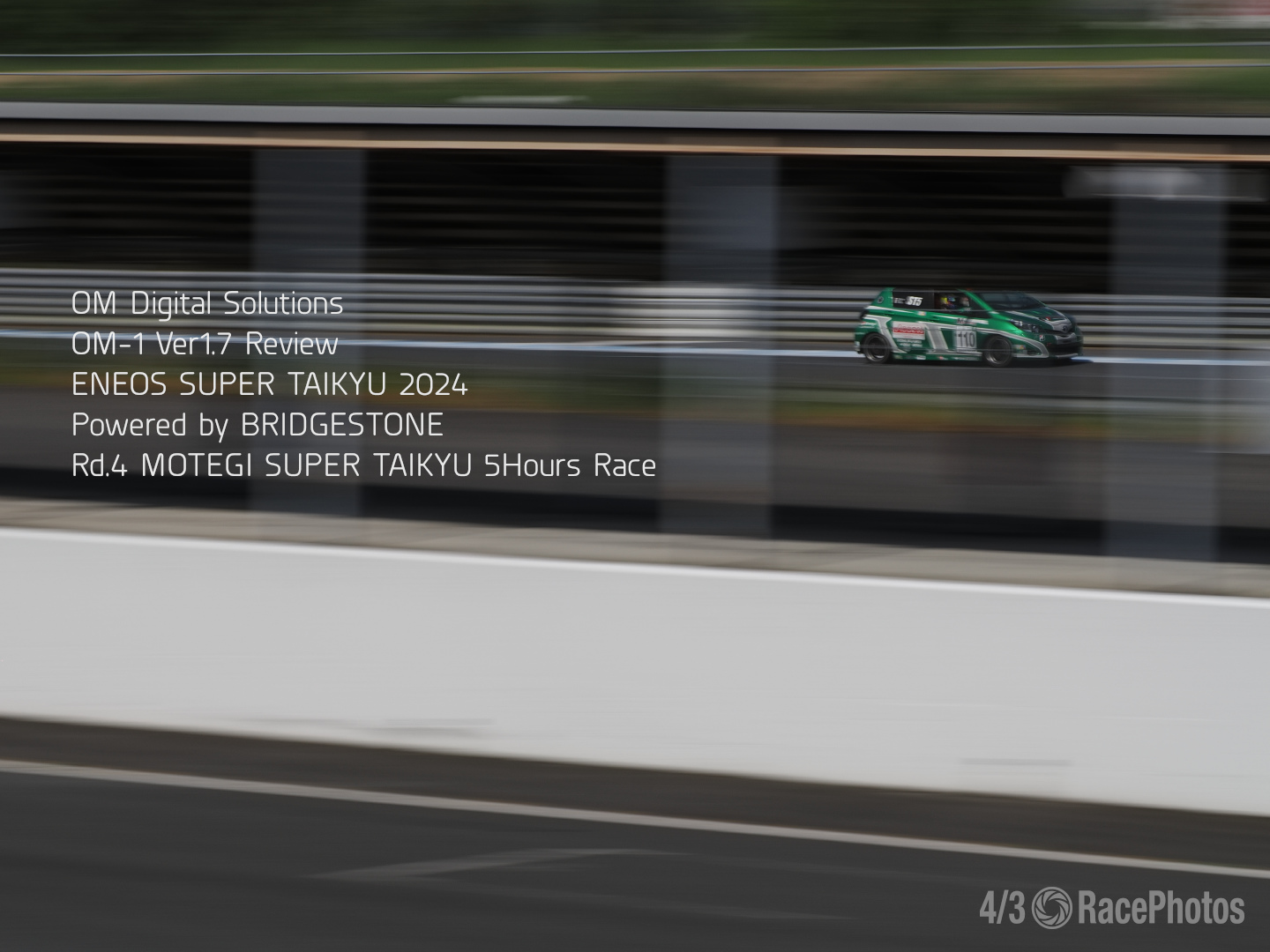
f/16 1/10sec ISO-80 150mm
結果としては(定性的な表現になってしまいますが)、EVFの見え方はあまり変わらず、コマ落ちを実感します。例えば成功した場合の上のような流し撮りでは、比較的大きめに被写体をおいた構図のため、EVFだけを見ていても実際の被写体の動きに遅れることなく追いかけることができますが、この半分くらいのより被写体サイズの小さいでは構図を作りたくても上手く追いかけることができませんでした(EVFだけ見ているとコマ落ちしている間に被写体がかなり移動している)。
センサーへの入射光量が少ない状況でOM-1のC-AFを使う場合は、例えば右目はEVFで被写体と構図を確認し、左目は目視で実際の被写体を追いかけながら右目EVFのコマ落ちを補助するというテクニックが有効です。原理的にリアルタイムの実像をファインダーで見ることがないミラーレスカメラ全般で効果的なテクニックなので、練習することをお勧めします。
OM-1とMark Ⅱのハードウェア面の進化として、バッファメモリの処理速度や容量のアップというのがカメラ評価系サイトで指摘されており、被写体検出とC-AFなどの複雑な処理を連続的に行いつつ、EVFのフレームレートを維持するようなハードウェアの限界性能に関しては、ファームウェアでは対応できない部分であり、やはりハード的な強化が必要だと考えられます。
考察. 検証結果を数字でみるC-AFの改善具合
ここまでの検証で、2000枚以上を撮影しました(連写をしているので、撮影したカット/シーンとしては平均してその半分の1000シーン程度)。検証では流し撮りのいろいろな状況を確認するためにシャッタースピードを変えていたので、主なシャッタースピード別に「AFの成功率」的な数字を計算すると、次のような結果になります。
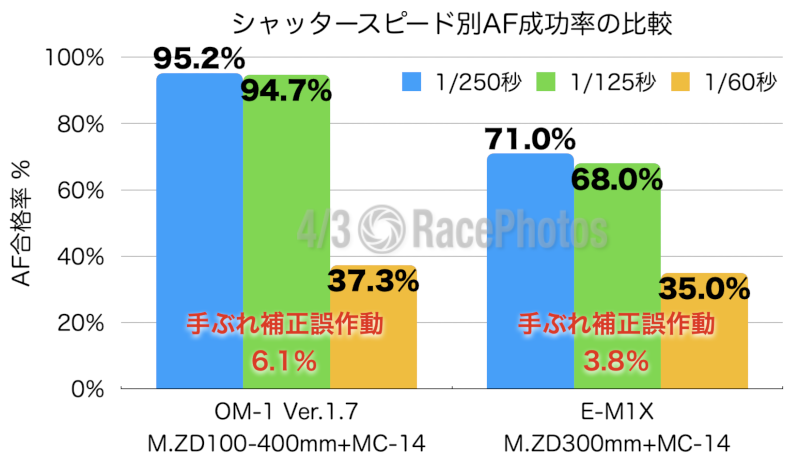
ここで「成功率」とは、撮影した写真を次のA〜Dに分類し、全体枚数におけるA+Bの枚数の割合として定義しています。
A.ピンボケ・ブレのない狙い通りの写真
B.ブレはあるが、ピントが確認できる写真
C.ピンボケしている、またはブレが大きいためピントが確認できない写真
D.手ぶれ補正の誤動作など原因がわかっているブレ、ピンボケ写真
この定義は、以前にE-M1XのAFを評価した際の基準です。

E-M1Xを評価した時と被写体もレンズも撮影枚数などの撮影条件も異なるため、統計学的に十分意味のある比較とは言い切れませんが、参考としてご覧ください。
今回のOM-1では、2000枚程度のうち、大半はシャッタースピード1/60秒以下で撮影したもので、より速い1/250秒(成功率95.2%)、1/125秒(94.7%)の条件では枚数が少なめ数十枚程度です。そのため、E-M1X(総数約500枚、1/250秒→71%、1/125秒→68%)よりも成功率が高めの数字が出ており、E-M1Xよりも良いように見えるというのが実際です。一方、1/60秒(37.3%)はE-M1X(35%)と同等か、少し良いくらいですので、ファームウェアVer.1.7によって、AFの性能としては、OM-1登場以前にオリンパスで最も良いとされてきたE-M1X以上になったと言えるでしょう。
もっと詳しく
あらためてお断りしておきますが、私が「AFの性能」や「AFの成功率」というのを議論する場合、一般的なカメラ評価サイトなどで試みられるような、三脚で固定したカメラと標準的なレンズで、機械的に一定の速度・方向で動く被写体を撮影したときのメカと制御の正確さを評価するものではなく、あくまで実際の撮影シーンで私がよく撮る条件で、実際にEVFを除きながらカメラとレンズを振って撮った、「揃えるべき基準自体にバラつきがある」結果です(それをカバーするためになるべく多くの枚数撮っています)。なので、この「AFの成功率」は、カメラ本体のAF制御だけでなく、組み合わせるレンズのフォーカス性能、EVFの見え方まで総合したものであり、「実際にサーキットに持ち出した場合に予想される成功カットの歩留まり」に近いと考えていただければと思います。
その点でいうと、ファームウェアVer.1.7は、上記のようなデータを意識せずとも、今までよりも「ちゃんと撮れる」を実感できており、C-AFの制御アルゴリズムだけでなく、AF全体の性能向上がカメラ全体で行われていると思われます。
先週の写真、OM-1 Ver1.7の歩留データとして失敗も全部残してて、ざっと見たところ、一連写でのOKカットが気持ち増えてる…撮りはじめ「今日は調子悪いな」くらいだったのに。
SS1/60sなので1枚目のGTRほどのガリピンは少ないけど、大体欲しい所にピンがきてるものの枚数が多い。#マイクロフォーサーズ pic.twitter.com/bvU636yqJT— Gami@43RacePhotos.com (@43racephotos) 2024年9月9日
ちなみに、C-AFモードとしてC-AFかC-AF+TRのどちらがより良いか?については、明確な数字を取れていませんが(EXIF情報にこの2つを区別する情報の記載がなく、撮影結果をカウントできていない)、感覚的にもどちらが優位とはいえるものはありませんでした。被写体を構図として画面上の一か所に決めて、それが変化しないように動く被写体を追いかけるような撮影方法では、二つのモードの差が結果に出ないと考えています。
Ver1.7になったOM-1で撮りたい、前ボケ構図
ここまではファームウェアVer.1.7の効果について検証し、OM-1 のAFで不満だった、被写体の手前に別のオブジェクトが入るとAFが引っ張られる不具合は解消されたことがわかりました。
これを実際の作品づくりに生かすために、ぜひチャレンジしてみたいのが「前ボケ」を使った構図。一般的な写真撮影の技法・用語としての「前ボケ」は、ピントの合った被写体より手前のオブジェクトが起こすボケのこと、あるいは、そういったボケを画面に配置することで画面に奥行を持たせたり、ボケによって画面に色や影を加えて雰囲気を変えるフィルターのような効果のことを意味しますが、流し撮りのシーンでこのワードを使う場合は、実際にはボケではなく「ブレ」。
流し撮りの主役になる被写体以外はブレて流れるわけですが、移動する被写体とカメラの間に部分的にオブジェクトが入ると、このオブジェクトもブレて流れて、その色や影が奥行やフィルターのような効果を与えることから、先ほどの前ボケと同じワードで表現します。
f/10 1/10sec ISO-200 140mm
例えばこの写真は、130R出口付近から出てきたマシンを被写体として100mほど離れたイン側の場所から見下ろすように撮ったものです。
画面には(当然)はっきりと写っていませんが、眼前に松の木がまばらに並んでいて、その幹と葉を前ボケとして利用しています。松の隙間から被写体出てくる瞬間や、逆に隙間に入っていく瞬間をファインダーから狙ってレリーズする感覚で撮影しました。
マシン後部が緑色になっていますが、松の葉の前ボケによるものです。また、画面のところどころに暗くなっているのは松の幹による影でできた前ボケです。逆に、画面中央付近は前ボケとなるものがない隙間で明るいエリアであり、ここにマシンのフロントがおさまった瞬間に被写体を強調することができています。
撮影としては、ピントはC-AFに頼ることができるので、被写体ブレなくしっかり画面内で「止める」ことに集中してカメラとレンズを振ります。被写体が通過するタイミング、レリーズするタイミングをいろいろ変えながら、前ボケの位置や形と被写体との重なりを探っていきます。
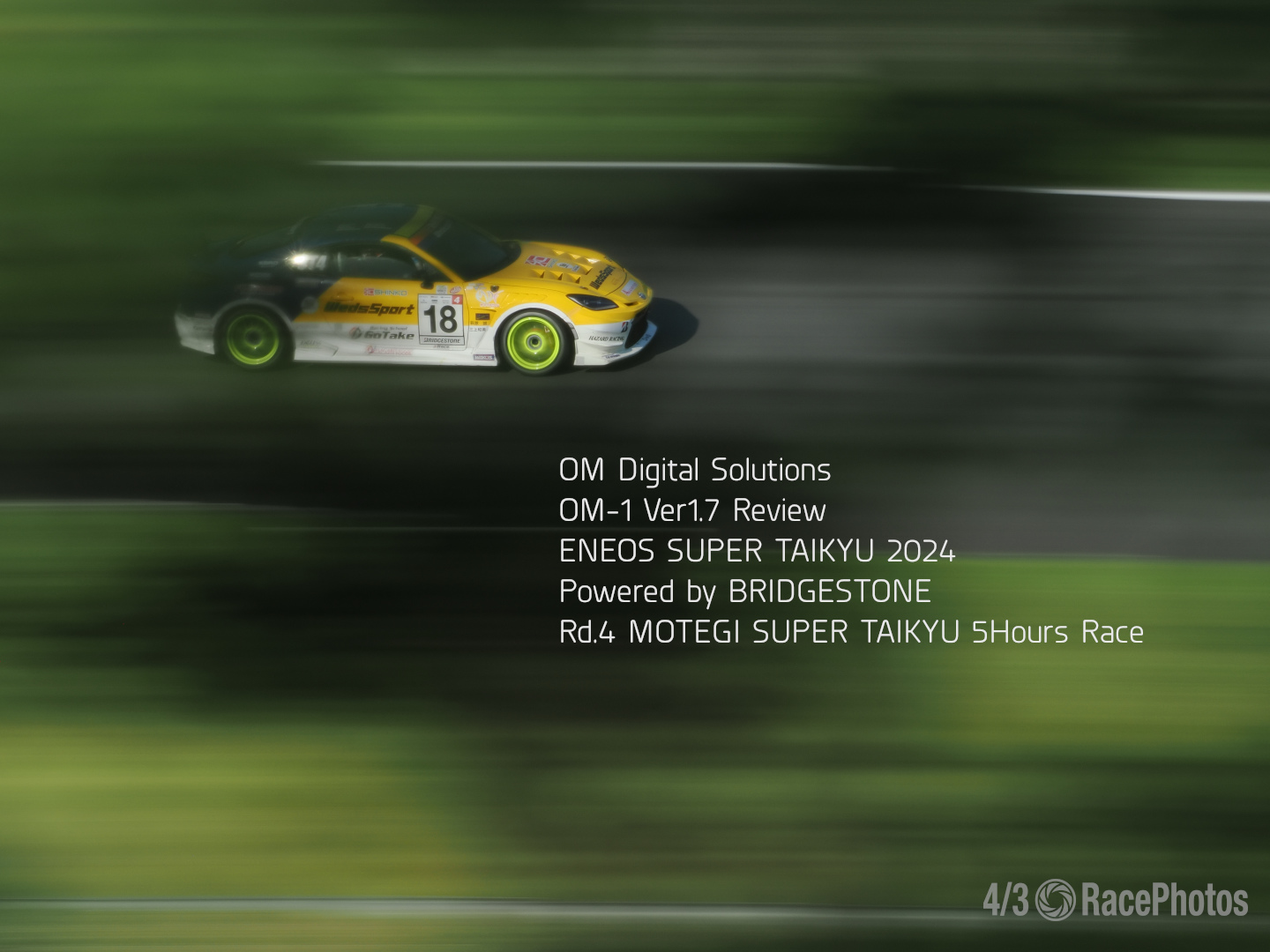
f/8 1/10sec ISO-80 20mm
今度は同じ130Rの反対側コース外から。金網とその柱、さらに外側に植えられた松を間に挟んで被写体を撮影しています。
レンズは12-100mmF4を使っています。金網越しの撮影では絞りを開放して金網を消し、被写体とコースだけで構図をつくりたいところですが、F4のボケでは消えませんでした。そこでISO80とND16フィルターを付けてめいっぱい露出を抑えてスローシャッター撮影できるようにし、ブレる金網を消さずに画面に少し残るように、絞りとシャッタースピードの組み合わせを変えてベストバランスを探しながら露出を決めました。
結果的に、金網の存在は残して前ボケとしつつ、マシン進行方向に並ぶ柱と松の間に被写体が入った瞬間を撮ることができたラッキーな一枚。もちろん、ピントはC-AFに任せて行いました(柱と松のAF影響を下げるためAF感度を-2に下げています)。
まとめ ~パワーアップしたOM-1でさらにカッコいい作品を撮ろう~

f/13 1/60sec ISO-80 300mm ※色調・コントラスト等編集しています
今回は、OM-1ファームウェアVer.1.7で以下のAFの不満点が改善されたか検証しました。その結果、
- 手前のオブジェクトにAFが引っ張られる
→Ver.1.7では被写体検出した被写体にAFし続け安定して撮影できた、AFリミッターやAF追従感度設定を活用した調整も効果的だった - 被写体のまわりに発生している陽炎に対してAFが不安定
→Ver.1.7では陽炎などの空気のゆらぎの中にいる被写体でもフォーカスが途中で止まる/飛ぶことなくAFできた - センサーへの入射光量が少ない条件でフォーカス動作を行うとEVFがコマ落ちする
→Ver.1.7でも改善が見られず、NDフィルターやテレコンを使用して暗くなるシーンではEVFに頼らない被写体確認の工夫が必要
となり、モータースポーツ撮影を行うためのカメラとしてOM-1は有効であるといえます。このことは、モデルチェンジしたOM-1 MarkⅡでももちろんモータースポーツ撮影に使えるということです。今すでにOM-1を持っていて、AFのためだけにMarkⅡを検討している方や、予算の都合でセールになっているOM-1や中古品のOM-1を検討している方には、「モータースポーツ撮影なら無印のOM-1でもVer.1.7で十分楽しめるよ」とおススメします。
今回紹介した作例の撮影ポイント

が発売されました。MarkⅡには新たな機能追加だけでなく、OM-1登場以来不評だっ ...){kind=link}